Apollo holdjáró
| Apollo holdjáró | ||
|---|---|---|
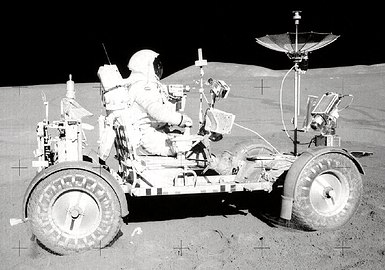
 Az Apollo–15 holdjárműve 1971-ben | ||
| Leírás | ||
| Feladat | Holdi szállítás | |
| Utasok | 2 fő: parancsnok, holdkomppilóta | |
| Méretek | ||
| Magasság | 1,14 m | |
| Hosszúság | 3,1 m | |
| Szélesség | 1,8 m | |
| Tengelytáv | 2,3 m | |
| Tömegek | ||
| Üres tömeg | 210 kg (a Holdon: 35 kg) | |
| Teljes tömeg | 700 kg (a Holdon: 116 kg) | |
| Motorok | ||
| LRV DC Motor (Egyenáram (DC) hajtotta motor x 4 db, egyenként | 0,2 kW | |
| Akkumulátor (Ezüst – Cink) x 2 db |
121 Ah | |
| Működési adatok | ||
| Tervezett üzemidő | 3 nap (78 óra) | |
| Hatótáv | 90 km | |
| A holdjáró vázlatrajza | ||
 Apollo holdjáró (NASA) | ||
| Apollo LRV | ||
Az Apollo holdjáró, vagy holdautó (angolul: Lunar Roving Vehicle, röviden: LRV, vagy Rover) egy az Apollo-program keretében gyártott űrjármű, amelyet az amerikai űrügynökség (NASA) megbízásából gyártottak és amelyek az űrhajósok Holdon való közlekedését oldották meg a három utolsó Apollo expedíción, a Hold tudományos kutatásának céljából. Először 1971. július 31-én vezették az Apollo–15 küldetés űrhajósai, így ez a példány (LRV–1) lett az első ember által vezetett terepjáró a Földön kívül. A Boeing fővállalkozásában – és a General Motors Pavlics Ferenc vezette alvállalkozásában – összesen négy darab holdjáró épült, amelyből három járt a Holdon.
Ez a kisméretű, kétüléses, elektromos hajtású, telepekkel üzemeltetett közlekedési eszköz egy funkcionális, lecsupaszított megjelenésű terepjáró, amely 3,1 méter hosszú volt és 210 kg saját tömeg mellett több mint 490 kg hasznos terhet tudott szállítani, szerény 14 km/h sebességgel, négy 0,2 kW-os villanymotorjának köszönhetően, nem újratölthető telepekkel. Műszakilag fejlett navigációs rendszerrel és eredeti kialakítású kerekekkel volt felszerelve. A rovert úgy tervezték, hogy a Hold talajának jellemzői nem voltak pontosan ismertek. Különösen nehéz környezetben (magas hőmérséklet, légkör hiánya, alacsony gravitáció, durva és laza terep) kellett működnie, amely nehezen lett volna reprodukálható a Földön. E korlátok ellenére nagyobb probléma nélkül teljesítette a rá háruló célokat.
A végül a holdjáróval végrehajtott három expedíció (Apollo–15, Apollo–16 és Apollo–17) során a rover lehetővé tette az űrhajósok számára a holdfelszíni munkájuk során, hogy jelentősen megnöveljék hatótávolságukat. További helyszíneket fedezhettek fel, és fejleszthették a Hold geológiájáról és kialakulásáról szóló tudásunkat.
Története szerkesztés
Korai elméletek szerkesztés
Az olyan szerkezetek, mint a holdjáró hosszú ideig csak a science fiction hatókörében voltak fellelhetők, így ennek az eszköznek az első említése Jerzy Żuławski lengyel szerző A Na srebrnym globie (Az ezüstgömbön) című regényében tűnik fel. Ez a képzeletbeli eszköz túlnyomásos kabinnal és elektromotorokkal szerelten rótta a Holdat és olyan képzeletbeli funkciókkal bírt, hogy például a kerekeit ki lehetett cserélni lábakra (vagy karmokra), amelyekkel a holdi dombokat, vagy más felszíni formákat mászhatta meg, miközben kb. 10 km/h sebességgel, azaz nagyjából a későbbi Apollo Roverek sebességével tudott haladni. Ezt követően mások is képzelegtek holdjárművekről. Tudományos igénnyel Konsztantyin Ciolkovszkij említi Vnye Zemlji (Távol a Földtől) c. munkájában egy holdjáró leírását.[1]
A sci-fi világán túl arra, hogy az ember eljuthat a Holdra, csak a 19.-20. század fordulóján születtek meg az első tudományosnak tekinthető elméletek, ám ezek csak legfeljebb odáig terjedtek, hogy egy embert szállító űrhajó leszáll a Holdon – köztük Jurij Kondratyuk 1916-os munkája, amely a holdkompos megoldást javasolta és amellyel végül az amerikaiak sikerrel teljesítették a Holdra szállást[2] –, arra, hogy ha már ott vannak a holdfelszínen az űrhajósok, akkor mit csinálnak és hogyan mozognak, csak jóval később születtek elméletek. Az első ilyen, tudományos igénnyel kidolgozott elképzelés Wernher von Braun és Willy Ley nevéhez fűződik, akik az űrkutatás amerikai népszerűsítésének szentelt munkájukban, a Collier's Weekly magazinban 1952-1954 között folytatásokban megjelent „Man Will Conquer Space Soon” (Az ember hamarosan meghódítja a világűrt) c. cikksorozatukban írták le részletesen egy holdexpedíció lehetséges menetét és a hozzá szükséges eszközök körét. Ebben a műben von Braun egy hat hetes holdexpedíciót körvonalazott, amelyben az űrhajósok két teljes holdi nappalt és egy holdi éjszakát töltöttek volna Földünk kísérőjén, és ezt az expedíciót egy 10 tonnás, daruval és hermetizált fülkével felszerelt traktor segítette volna a helyváltoztatásban és a felszerelések szállításában.[3] Ennek az elképzelésnek állított tudományos konkurenciát Hermann Oberth, aki 1954-ben jelentette meg Man into Space (Emberrel az űrben) c. munkáját, amelyből később, 1959-ben jelent meg egy javított részmunka németül Das Mondauto (A holdautó) címmel, ám ez is von Braunéhoz hasonló monstrum volt 5 m átmérőjű gömbkabinjával és 18,5 méteres magasságával, 1654 kg-os tömegével és 150 km/h-ra becsült sebességével.[1]

Ezt követően röviddel, 1956-ban jelent meg Mieczysław G. Bekker munkája a felszíni helyzetváltoztatásról. Bekker a mű megjelenésének idejében Michigani Egyetem professzora és a U.S. Army Tank-Automotive Command (USA Hadserege Tank-Gépjármű Parancsnokság) konzultánsa volt. A könyv elméleti kutatásokat publikált, amelynek részét képezte a holdi mozgás is és amely elméleti anyag később alapul szolgált a holdjárművek kifejlesztésekor is.[4]
1959-ben a U.S. Army Ordnance Missile Command (USA Hadseregének Anyagi Szolgálata Rakéta Parancsnoksága) az alabamai Huntsville-ben elkezdett dolgozni a Project Horizon nevű tervén, amely egy holdbázis létrehozását célozta meg katonai célokra. Ebben a munkában is szerepelt egy holdjáró a maga 900 kg-jával, elektromos hajtásával és a később is legnagyobb bizonytalanságra, a talaj teherbíró képességére reflektáló lánctalpaival, illetve 80–240 km közötti hatótávjával. A NASA, majd a Marshall Űrközpont megalakulásával ennek a projektnek az emberállománya került át az űrhivatalhoz és lett felelős a később valóban megvalósult holdjáró tervezési munkájának koordinálásáért. Ezen mérnökcsapat tagja volt Georg von Tiesenhausen, aki a korábbi hadseregbeli munka továbbvitelével felállított egy elméleti alapvetést, vagy ha úgy tetszik követelményrendszert a leendő holdjárművel kapcsolatban, amelyben olyan javaslatok szerepeltek, mint a négykerekű, egyéni motorok általi hajtás, vagy a nem felfújható, rugalmas kerekek és amely a legtöbb végül megvalósult jellemzőre tett javaslatot 1960 táján.[1]
Koncepciók az Apollo-programhoz szerkesztés

Az Apollo-program elindulásakor a teljes koncepció részét képezte az űrhajósok majdani holdfelszíni mozgásának kérdése is. Az erre vonatkozó tanulmányok, koncepciók kidolgozásának feladatát a Marshall Űrközpont kapta, amelynek vezetője az ebben a témában már magát exponált Wernher von Braun volt. A NASA ebbe a munkába több ipari szereplőt bevont, így a Lockheedet, a Bendixet, a Boeinget, a General Motorst, a Brown Engineeringet, a Grummant és a Bell Aerospace-t. Az 1960-as évek kezdetétől fogva így öltött sorban testet a Lunar Logistcs System (LLS – Holdi logisztikai rendszer),[5] a Mobile Laboratory (MOLAB),[6] a Lunar Scientific Survey Module (LSSM – Holdi Tudományos Felmérő Egység)[7] és a Mobility Test Article (MTA – Mobil Teszt Példány).[8] Erről az ipari együttműködésről 1964-ben számolt be Wernher von Braun a közvélemény számára a Popular Science magazin oldalain, ahol kifejtette, hogy a Holdra szállás során a NASA-nak szüksége lesz valamilyen holdfelszíni járműre is és ebben az irányban már megindultak a kutatások.[9]
A kezdeti koncepciók idején a NASA még nem hozta meg végső döntését a Holdra szállás mikéntjéről, a LOR koncepcióról, ezért mindenki a rendelkezésekre álló elképzelésekből, elsősorban az EOR koncepcióból indult ki, azaz abból, hogy egy holdexpedícióhoz két Saturn V rakéta indítása szükséges: az egyik viszi a legénységet egy Lunar Surface Module (LSM – Holdfelszíni Egység) fedélzetén a Holdra, amely aztán a leszállás után majd hazatér a Földre, egy másik pedig egy teher LSM lesz, amely a felszerelést, az ellátmányt és a holdi közlekedéshez szükséges járművet szállítja a szomszéd égitestre. Ennek az elképzelésnek megfelelően az első holdjárók nagyméretű és nagy tömegű eszközök lehettek, mivel a felbocsátandó tömegre nagyobb limitek vonatkoztak. Ezen tervezési alapvetésekből kiindulva a Grumman és Northrop 1962 őszén elkezdte a saját, nagy, nyomás alatti kabinnal és minden kerékre saját elektromos motorral rendelkező járművének a tanulmányait elkészíteni, míg a Bendix és a Boeing is saját belső tanulmányokat indított a holdfelszíni jármű létrehozására.[1]

A két irányon induló kutatásokban a Grumman és a Northrop részvételével a Marshall Lunar Logistics System (Holdi Logisztikai rendszer) projektjéhez készültek tervek. Ezek keretében egy nagyobb és egy kisebb rovert vettettek előre a tervezők, a nagyobb egy 3000 kg-os, míg a kisebb egy 1500 kg-os szerkezet volt. A nagyobbik rover két űrhajóst fogadott volna be és túlnyomásos kabinjában 30 napig lehetett fenntartani a megfelelő életkörülményeket az utasok számára, miközben a felfedezőutakhoz 450 km-es hatótávot biztosított, 14 km/h haladási sebesség mellett. A jármű 5,4 méter hosszú és 2 m széles volt, meghajtását a kerekenként elhelyezett elektromotorok adták, amelyek számára cseppfolyós hidrogént és cseppfolyós oxigént elegyítő üzemanyagcellák termelték az áramot. A kisebb rover 3,6 méter hosszú és 2,5 méter széles volt és a szintén túlnyomásos kabinja hét napig volt képes életben tartani két utasát, miközben 368 km távra tudta eljuttatni őket 9 km/h sebesség mellett. A meghajtást ugyanazon az elven kapta a jármű, mint a nagyobb testvére.[1]
A Marshall Űrközpont egy másik projektet is beindított, Apollo Logistics Support System néven, ebben pedig a Bendix és a Boeing kapott meghívást 1964 júniusában, az előző projektével hasonló témában, az űrhajósok holdi mozgásának elősegítésében. A kiírásban szereplő követelményrendszer után a MOLAB néven említett járműre hat hónappal a felhívást követően mindkét cég beadta elképzeléseit. A követelmények között szerepelt, hogy az eszköznek két űrhajós elhelyezéséról és életfeltételinek fenntartásáról kell gondoskodni egy 14 napos perióduson belül, így nem meglepő, hogy ez a két jármű is nagyméretű, nyomás alatti kabinnal bírt és míg a Bendix verziója 3060 kg-os volt a Boeingé 3650 kg-os. Ezen kívül a Bendix egy „hagyományos”, négy kerekű verzióval állt elő, ám a Boeing terve különleges volt, két részre osztották a járművet, a kabint is tartalmazó első szekcióra, vagy traktorra, amelynek négy kereke volt és egy hátsó szekcióra, egy kvázi utánfutóra, amelynek további kettő. Minkét monstrumot kerekenként szerelt elektromotorok hajtották, amelyek üzemanyagcellából vették az elektromos áramot. A MOLAB megépítésére szerződés is született a két céggel, így a tanulmányok testet is öltöttek később. A prototípusok megépítését követően a szerződéseket kiterjesztették és a Marshall egy kisebb jármű iránt is megfogalmazta igényét, amely a Local Scientific Survey Module (Helyi Tudományos Felmérő Egység) nevet kapta és a követelmények között az szerepelt, hogy a lehető legegyszerűbb, kisméretű jármű legyen, amelyen űrruhában ülnek az űrhajósok – tehát nincs szükség túlnyomásos kabinra – és a jármű tömege a MOLAB egyhatoda legyen. Az így megszülető járműtanulmányokat nevezték el Mobility Test Article (Mobilitási Próbadarab) néven és ezek voltak az elsők, amelyek végre erősen emlékeztettek a később megvalósuló valódi Apollo Lunar Roverekre.[1]
Ezek mellett volt egy másik tervezési irány is, a General Motors részéről. Az addigra a járműgyártó céghez átkerült Mieczysław Bekker (aki a cég Defence Research Laboratories divízióját vezette a kaliforniai Santa Barbaraban) egy tanulmányt készített a NASA Jet Propulsion Laboratory részlegének megrendelésére, amelyben egy kisebb, személyzet nélküli holdjárót vizionált a Surveyor-program számára. Ebben a tanulmányban jelent meg először a szintén a General Motorsnál dolgozó Pavlics Ferenc koncepciója, amely fémhálóból készített rugalmas kerekeket alkalmazott (és amelyeket később szinte az összes hold- és marsjárón alkalmaztak).[10]
A NASA döntése a LOR koncepció kiválasztásáról technikailag, majd az 1964-es költségvetési tárgyalások (amelyben a Kongresszus féket próbált tenni az Apollo-program költéseire) politikailag hozta meg azt az irányváltást, hogy egy holdexpedíció egyetlen Saturn V indításával fog végbemenni, így a teherszállító holdi leszállóegységek (és a velük szállított eszközök) végét jelentette. A követelményrendszerben ez azt jelentette, hogy a Holdra leszálló személyszállító űrhajónak kell szállítania magával a holdjáró rovert is, legyen az bármilyen kialakítású. Ezzel a döntéssel a nagyméretű és tömegű változatok sorsa megpecsételődött és a figyelem a kisebb verziók felé fordult. A lényegében a Redstone Arsenal technikai emberállományából alakult Marshall Űrközpont számos alkalommal vette igénybe a Brown Engineering Company közreműködését különböző projektekben, így a döntéssel megpecsételődött sorsú Boeing, Bendix, Grumman és Northrop tanulmányok mellé az űrközpont vezetője, Wernher von Braun felkérte a hagyományos technikai partnert, hogy ő is dolgozzon egy alternatív holdjáró koncepcióján, miközben a többi partner is tovább finomította saját elképzelését. Az új koncepció már az űrruhába öltözött űrhajós utasokra épített és elsősorban az ő ilyen formában végzett munkájának feltételeit, azaz a humán faktort (így a rover irányítását, az áramellátást, a telemetriát, a navigációt és a rover életfenntartó rendszereinek működését) vette célba. A Brown mérnökei egy kis, sokban a második világháborús Willys Jeep mintájára hajazó holdjárót vázoltak fel és építettek meg, amelyben ahol csak lehetett, a kereskedelemben elérhető részegységeket alkalmazták.[11][12]
A legnagyobb ismeretlent a holdfelszín karakterisztikája jelentette a tervezés során. Egyes csillagászati feltételezések között a felszínt mély, laza por borította, amelyben bármi – ember, jármű, űrhajó – könnyen elsüllyedhetett, míg más feltételezések csak pár centiméter ilyen laza réteget feltételeztek. Csak az 1966-67-es Surveyor leszállások tisztázták, hogy az utóbbi feltételezés a valós. A holdjáró tervezőinek így a legnagyobb problémája az maradt, hogy milyen kerekeket használjanak a bizonytalan felszínen. A Brown ennek felméréséhez egy saját, kráterekkel és kövekkel szabdalt tesztpályát állított fel és alap verziónak a Pavlics Ferenc-féle rugalmas kerekeket választotta. A megépült prototípusra egy 1,2 méter átmérőjű, belső tömlőre tekercselt vízisí köteles megoldást szereltek fel, amely kellőképpen rugalmas volt és a kapaszkodási képessége is kiemelkedő volt. Megkezdődtek a széles körű tesztek a prototípussal, amelyet még az egyhatod gravitációt előállítani képes NASA KC–135A Stratotanker gépeken is elvégeztek. Kezdetben még nem állt rendelkezésre a Pavlics-féle dróthálóból font kerék, majd amikor ez megérkezett ennek a széleskörű kipróbálását is elvégezték (ekkor derült ki például, hogy az addig szükségtelennek látszó sárvédőkre is nagy szükség van, mivel a hálós kerekek fokozottan vertek fel nagy mennyiségű port). A Brown által tervezett jármű lényegében erősen hasonlított a később megvalósult Lunar Roverre, az egyetlen különbség, hogy ennél az eszköznél még erős bukókeretekkel védték az utasokat a borulás ellen, amelyeket később elhagytak. Fényképek tanúsága szerint az eszközt maga Wernher von Braun is kipróbálta.[11][12]
Ember irányította holdjáró projekt szerkesztés

A NASA – különböző tudományos konferenciákon felmerült érvek hatására – 1969. május 23-án jelentette be, hogy elindítja az Apollo-program keretein belül a Manned Lunar Rover Vehicle Programját (Ember irányította holdjármű program), a Marshall Űrközpont hardverfejlesztési programja részeként. Erre válaszul a Marshallnál 1969 júniusában megalakították Lunar Roving Vehicle Project Office-t, amelynek vezetését Saverio F. Morea rakétamérnökre bízták. Morea és csapata összeállított egy részletes követelményrendszert, amely 22 pontból álló kiírást küldött el 29 vállalatnak 1969. július 11-én:[1]
- Konfiguráció: Az LRV egy négykerekű jármű kell legyen, amelyet akkumulátorok által táplált, minden kerékhez külön rendelt elektromotorok mozgatnak. Az LRV-t manuálisan irányít a egy a rajta ülő űrhajós
- Tömeg: maximum 400 font (kb. 180 kg), amely magában foglalja a holdkompon való rögzítéshez és az üzembe helyezéshez szükséges eszközöket is
- Rakomány szállítási kapacitás: 100 font (kb. 45 kg) tudományos mérőeszköz, valamint a két űrhajós, egyesével 370 font (kb. 168 kg), együttesen 840 font (kb. 380 kg), vagy egy űrhajós, kiegészülve 470 font (kb. 213 kg) teherrel, amely alternatívákat kiegészít még 70 font (kb. 32 kg) holdi talaj, vagy kőzetminta
- Hatótávolság: Az LRV-nek képesnek kell lennie teljesíteni négy 30 km-es utat egy 78 órás időkereten belül, azaz összesen 120 km-t
- Élettartam: Az LRV-nek legalább 78 órás üzemidővel kell rendelkeznie a holdi nappal körülményi között
- Elhelyezés: A Rovert a holdkomp egyik rakterében kell tudni elhelyezni
- Sebesség: Az LRV-nek képesnek kell lennie 16 km/h állandó sebességre egy egyenletes sík holdfelszínen és a sebességet 0–16 km/h között kell tudni változtatni folyamatosan
- Üzembe helyezés: Az LRV-t egyetlen űrhajósnak is üzembe kell tudnia helyezni minimális beavatkozással
- Sterilizáció: Nem feltétel, de a beszállítónak javasolnia kell az erre vonatkozó megoldását, hogy minimalizálni lehessen a biológiai szennyeződés szintjét, amely egyúttal megfelel a holdkomppal szemben jelenleg támasztott követelményeknek is
- Akadály leküzdés: 30 cm magas akadályon kell mindkét keréknek szabadon átgördülnie, illetve 70 cm széles szakadékot kell tudni leküzdeni
- Lejtő leküzdés: A teljesen megrakott LRV-nek 25°-os lejtőn is tudni kell le- és felfelé közlekedni
- Hibatűrés: A Rover rendszereinek és alrendszereinek képesnek kell lennie, hogy egyetlen jelentkező hiba ne jelentse a használat végső megszakítását és egy második hiba se hozza veszélyhelyzetbe a legénységet
- Vezethetőség: Az LRV-t egyetlen űrhajósnak képesnek kell lennie leellenőriznie és irányítania a holdfelszínen a rajta elhelyezett műszerek és kijelzők segítségével
- Legénységi biztonság: Az LRV dizájnjának és a műveleti leírásának tartalmaznia kell minden olyan tényezőt, amely biztosítja legénység biztonságát minden azonosított veszéllyel szemben (ilyen veszélyek lehetnek a napsütés tükröződése a Rover felületein, a holdfelszín egyenetlenségei, a jármű instabilitása stb.)
- Hátramenet: Gondoskodni kell arról, hogy a legénység kilátása biztosítva legyen, amennyiben ilyen üzemmódban mozgatja a járművet
- Por: A kritikusnak bizonyuló felületeket, vagy alkatrészeket úgy kell tervezni, hogy azokon minimálisan üljön meg a por és úgy kell elhelyezni, hogy a por minél kevésbé tudja befedni őket
- Hasmagasság: Az LRV-nek képesnek kell lennie, hogy maximum 35 cm magas akadályok felett szabadon átgördüljön
- Oldal- és hosszirányú stabilitás: Minimum bólintási és borulási szög 45° kell legyen teljesen feltöltött állapotban
- Fordulókör: Hozzávetőleg a jármű hosszával megegyező kell legyen
- Vészhelyzeti segítség: A vészhelyzeti segítség segítse könnyedén a helyzet elhárítását (pl. kapaszkodókkal)
- Az áramellátó rendszernek állandó 150 W pluszteljesítményt kell nyújtania az LRV szükségletein felül haladás közben
- A beszállítónak specifikálnia kell az LRV gyorsulási adatait a pályázatában
Érdekesség volt, hogy a NASA eleve a négykerekű konstrukcióra írta ki a pályázatot, mellőzve minden más, a porban való elsüllyedésre választ adó megoldást (pl. lánctalp), amellyel így a Surveyor szondák eredményei alapján hivatalossá vált az a nézet, miszerint a Holdat csak pár centiméter vékony porréteg fedi, alatta kőzet található. További érdekesség volt a kiírás által nagyon egyszerűen megfogalmazott követelmény, miszerint a holdjárót úgy kell összehajtogatni, hogy az a holdkomp egyik rakterében elférjen. A feladat nagyságát jelzi, hogy végül a holdjáró dimenziói hasonlatosak voltak egy Mercedes-Benz 190 típusú nagyobb kompakt autóval (amelyet kb. VW Bogár méretűre hajtogattak, ezek tetejét leszámítva természetesen). A pályázatokban az első Rover leszállítását 1971 áprilisára írták ki követelményként, azaz szinte lehetetlenül rövid időkeretet szabott meg a NASA.[1]
A meghívott 29 cég közül végül négy válaszolt a felhívásra, a Grumman, a Chrysler, a Bendix és a Boeing. Morea és csapata szeptember 28-ra a négyfős mezőnyt kettőre szűkítette, a Bendixet és a Boeinget továbbjuttatva egy második értékelési fordulóra és részletes tárgyalásokra mindkettővel. 1969. október 28-án végül kihirdették a nyertest: a Boeing nyerte el a 19 000 000 dolláros szerződést és a jogot, hogy az első Földön kívül használt embervezette járművet megalkossa. A szerződés keretein belül a Boeingnek 8 db járművet kellett előállítania és leszállítania, amelyből négyet szántak Holdra szállásra (a negyediket végül a holdjárót alkalmazó utolsó expedíciók törlése miatt lényegében inkább össze sem szerelve, alkatrészként szállították le). A többi négy jármű a földi tesztek céljaira épült: integrációs, vibrációs, 1/6 gravitációs és rendszertesztekre.[1]
1970. január 18-19-én a kezdeti vázlattervek áttekintésével a Boeing és a NASA (Marshall Űrközpont) mérnökei megtartották az első közös szimpóziumukat, amelyen a tervek áttekintésére került sor azzal a céllal, hogy a tervek megvalósíthatóak-e és végül elvezetnek-e a rover kívánt teljesítményéhez. 1970. június 16-17-i dátummal pedig egy második tervegyeztetésre került sor a Marshallnál, ahol már azt kellett eldönteni, hogy a dizájn kész és a jármű gyártható.[1]
Pavlics kezdetben Detroitban dolgozott a General Motors (GM) alkalmazottjaként. Itt kezdődött el amerikai mérnöki pályafutása. Eleinte nagy mozgékonyságú terepjáró járműveket fejlesztett a US Army Tank Automotive Command számára, miközben a Michigani Egyetemen posztgraduális tanulmányokat folytatott. 1961-ben a GM Santa Barbara-i kutatóintézetébe helyezték át, ahol vezető mérnökként vett részt a bolygók felszínén közlekedő távirányítású és ember vezette terepjárók tervezésével, fejlesztésével kapcsolatos kutatómunkákban. Később a NASA Jet Propulsion Laboratory és a Boeing Aerospace Corporation megbízására a GM szerződéses munkáinak keretében a holdbázisú terepjáró kifejlesztését irányította.
A tervezési és gyártási folyamatba a Boeing alvállalkozót is bevont. A General Motors Defence Research Laboratory kapta a holdjáró mobilitási rendszereinek (a kerekek, motorok és a felfüggesztés) kidolgozásának feladatát, míg a fővállalkozó Boeing az elektronika és a navigációs rendszer kidolgozásáért, valamint a rendszerintegrációkért volt felelős). A General Motors részéről a magyar származású Pavlics Ferenc vezette azt a csoportot, amely a holdjáróval kapcsolatos fejlesztéseket végezte.
A tervezés lezárultát a tesztek követték, amelyre három fázis állítottak fel a mérnökök: a fejlesztési teszteket, a tervezési és minősítési teszteket. A fejlesztési tesztek kipróbálták a tervezési koncepciókat, alternatív dizájnokat javasoltak és lefektették a gyártási folyamatokat. A minősítési tesztek során kipróbálták az egyes részegységeket, szimulált holdi feltételek mellett, hogy megbizonyosodjanak azok teljesítőképességéről és megfelelőségéről. Ezek a tesztek 32 különböző lényegi próbát öleltek fel és kb. 6000 oldalnyi dokumentáció született róluk egy kilenc hónapos időtartam alatt. A legutolsó tesztfázis során mind az egyes részegységek, mind az összeszerelt holdjáról nyúzópróbáira sor került, amelynek keretében például 78 órára egy vákuumkamrába helyezték el a tesztpéldányt, vagy a NASA egyhatod g-t imitáló KC–135-ösén végeztek kísérleteket.[1]
A holdjáró legforradalmibb találmányának a kerekek bizonyultak. Egyes források szerint ehhez Pavlics Ferenc irányításával a General Motorsnál lényegében újra feltalálták a kereket. A Hold hőmérsékleti körülményei között (a napon + 120 °C, árnyékban −150 °C) a Földön használt gumikerekek használhatatlanok, akár felfújható, akár tömör változatban, ezért a mérnökök egy rozsdamentes acél drótszövetből álló „tömlőt” alkalmaztak (alumínium „felniken”) , amelynek futófelületére (nagyjából annak 50%-át lefedve) ék alakú titán csíkokat rögzítettek, amelyek a kapaszkodóképességet fokozó „futófelületet” adták. A hálón belül egy szintén titánból álló belső tömlő szolgált a terhelések, egyenetlenségek okozta deformáció elnyelésére. A tömlőn belül egy görgőkből álló szerkezet futott, amelyet 1/4 lóerős meghajtás forgatott körbe kb, 10000 ford/perc sebességgel, amely végighengerelte belülről a belső felületet, kijavítva az esetleges benyomódásokat.[1]
A holdjáró megjelenése magára az egész hardverre is hatással volt, a megnövekedett feljuttatandó, majd a holdfelszínre lejuttatandó tömeg miatt. A legnagyobb változásokat (a holdjáró plusz tömegét kiegészítve a három, egyenként maximum nyolc órára növelt holdsétákhoz szükséges többlet ellátmány tömegével) a Saturn V szenvedte el. A szerkezetet érintően két változást hajtottak végre, egyrészt az első és második fokozat közötti leválasztást végző piropatronok számát 8 darabról 4-re csökkentették, ugyanígy elhagytak négy fékezőrakétát is az első fokozatról, valamint az S-II hajtóműveinek égésterén végeztek kisebb változtatást a korábban észlelt oszcillációk kiküszöbölésére. Ezen kívül alacsonyabbra – 166 kilométerre – helyezték a földi parkolópálya magasságát és a biztonsági üzemanyagmaradék mennyiségét is csökkentették, ezáltal hosszabb ideig éghettek a hajtóművek. Ezekkel a változtatásokkal 500 kg-mal sikerült megnövelni a Holdhoz juttatható tömeget, amely fedezte a holdjáró és a megnövekedett ellátmányigény tömegét.[13]
A holdjáró tervezése és megépítése – a teszteken alapuló módosítások figyelembevételével is – végül 18 hónapot vett igénybe és a Boeing az első kész példányt 1971. március 10-én adta át a NASA-nak a saját telephelyén. Miután a NASA átvette az elkészült példányt, összehajtogatták, becsomagolták és leszállították Cape Canaveralre, ahol ismét kicsomagolták, széthajtogatták, egy újabb teljes rendszertesztet végeztek el rajta, mielőtt repülésre alkalmasnak ítélték. Ezt követően ismét repülési konfigurációba hajtogatták és felszerelték az LM–10 (Falcon) holdkompra, hogy az 1971. július 26-án elstartolhasson a Holdhoz és később leszálljon annak Hadley-Appenninnek régiójába.[14]
Felépítése szerkesztés
a Rover a MOLAB tanulmányok túlnyomásos kabinjával szerelt járműformájához képest meglehetősen egyszerű, lecsupaszított kialakítású, lényegében egy földi jármű kopasz alvázához hasonló szerkezet lett, mivel a súlytakarékosság miatt elhagytak minden borítólemezt, amelyre légkör híján a Holdon nincs szükség (az űrhajósok életfunkcióinak fenntartására kizárólag az űrruhák és a hátizsákként viselt PLSS berendezések szorítkoztak, erre a problémára a holdjáró nem rendelkezett bármiféle megoldással). A holdjáró üres tömege 210 kg volt (holdi körülmények között 35 kg), teljes terheléssel pedig elérhette a 700 kg-ot (holdi körülmények között 116 kg), azaz a hasznos terhelés 490 kg volt (a Holdon 82 kg), amely a két űrhajós 363 kg-ja és a hordozható felszerelés 127 kg-ja között oszlott meg. A Rover hossza 3,1 méter, szélessége 1,8 méter, tengelytávja 2,3 méter volt. Négy kerekű kialakítása volt. A holdautó földi közlekedésre alkalmatlan lett volna, ugyanis összeroppant volna az űrhajósok és felszerelésük súlya alatt. A földinél hatszor gyengébb holdi gravitáció mellett azonban a terhelése lényegesen kisebb volt.[15][16]
A holdjáró rendszereit a szisztematikus redundancia jellemezte, azaz egy rendszer meghibásodása esetére mindig volt tartalék rendszer, amely lehetővé tette a jármű működését meghibásodás esetére is, ám a NASA a biztonsági határok kijelölésekor úgy döntött, hogy a Rover műveleteit úgy kell összeállítani, hogy az űrhajósoknak bármikor képesnek kell lenniük gyalog is visszajutni a holdkompba, ha a járművük meghibásodik. Ez komoly mértékben lecsökkentette a jármű akciórádiuszát, mivel így 10 km volt a legnagyobb távolság, ahová a holdjáróval az űrhajósok elérhettek, majd ez az idő előrehaladtával és az űrhajósok hátizsákjában levő létfenntartó készletek fogyásával egyre szűkült.[15][16]
Az alváz szerkesztés
A holdjármű alváza 2219-es alumínium ötvözetből készült, hegesztett csövekből épült fel és három részre osztott konstrukció volt. A három rész: elülső rész, középső és hátsó rész. Erre azért volt szükség, mert az elülső és hátsó rész csuklósan fel- és lehajtható volt, ezeknél a hajtási éleknél oldottál meg a jármű holdkompban való elhelyezéséhez az összecsomagolást, hogy az minél kisebb helyen elférjen az odaúton. Széthajtogatott állapotban a rover 3,1 méter hosszú, 1,8 méter széles befoglaló méretekkel rendelkezett, magassága pedig 1,14 méter volt. A talaj feletti magassága terheletlenül 43 cm, terhelten 35,6 cm volt.[15][16]
A jármű elülső részén helyezték el a két akkumulátort, valamint a kommunikációs és navigációs rendszert, a kamerákat, valamint a fedélzeti elektronikát. A középső részen helyezkedett el a két űrhajós ülése, amelyeket az alvázkeretbe rögzített alumínium padlóra rögzítettek és a támlájuk lecsukható volt. Az ülések közé karfákat szereltek és állítható lábtartók is a dizájn részét képezték, illetve az üléseket tépőzáras biztonsági övekkel is felszerelték. A jármű kormányzására (és a gázadásra) nem hagyományos kormány, hanem joystick szolgált, amelyet szintén a középső részre szereltek be, ahogy műszerfalat is (a joystick a két űrhajóstól egyenlő távolságra volt, így szükség esetén bármelyikük vezethette a járművet, normál esetben ez azonban a bal oldalon ülő parancsnok feladata volt). A hátsó rész lényegében egy rakodórekesz volt, ahol szerszámokat, mintazsákokat és az egyéb fedélzeti tudományos berendezéseket lehetett elhelyezni.[15][16]
A futómű szerkesztés
.jpg)
Az alvázhoz a négy kerék, négy független kerékfelfüggesztésen keresztül kapcsolódott. A Felfüggesztések kettős keresztlengőkarokon keresztül kapcsolódtak az alvázhoz, amelyeken hidraulikus lengéscsillapítók szolgáltak a függőleges mozgások tompítására. Mindegyik keresztlengőkar torziós rudakon keresztül csatlakozott az alvázhoz (kerekenként két rúdon keresztül).[15][16]
A felfüggesztések négy kereket tartottak, amelyek az egész holdjáró koncepció legnagyobb újdonságát és műszaki invencióját hordozták magukban. A NASA-nak előzetesen az Apollo–14-ről volt egyáltalán valamiféle tapasztalata kerekekkel a Holdon, amikor Alan Shepard és Stu Roosa űrhajósok egy mobil kiskocsin (az űrhajósszleng által „riksának” csúfolt eszközön, hivatalos nevén a MESA-n) húzták maguk után a felszerelést, majd a begyűjtött kőzet és talajmintákat). Ezen a kézikocsin a Goodyear által gyártott gumikerekeket alkalmazták, amellyel nem voltak jók a tapasztalatok. Az előzetes tanulmányok alapján a mérnökök a fejlesztéshez már elvetették a gumit és a General Motors Mieczysław G. Bekker kutató nevével fémjelzett és Pavlics Ferenc által vezetett csoportja által javasolt speciális kereket vették alapul.[15][16]
A Pavlics-féle kerék külső átmérője 81 cm(32 hüvelyk) magas és 23 cm (9 hüvelyk) széles volt. A tömeg csökkentése érdekében a felnik alumíniumból készültek. Annak érdekében, hogy könnyebben haladjon a jármű holdfelszín porborította felületén, a hagyományos gumiabroncsot fonott rozsdamentes acélhúrokból készült dróthálóval helyettesítették. A háló 800 db 81,3 cm hosszú és 0,8 mm átmérőjű, nagy szilárdságú horganyzott acélhuzalból készült, amelyek 4,7 mm -enként metszik egymást. A gyártás során röntgennel ellenőrizték a húrok minőségét. A kerék futófelületét a felületének több mint 50% -án titánlemezek borítják, amelyek a hálóhoz vannak szegecselve, és sávokat képeznek. Ezek a lemezek lehetővé tették a húzóerő jobb átvitelét.[15][16]
Mind a hátsó, mind az első tengely kormányozható volt, így a fordulási sugár 3 m-re csökkent. Szükség esetén az egyik tengely rögzíthető volt. A tengelyeken levő kerekek kormányzását 0,1 lóerős kis villanymotorok végzik párosával (a redundancia biztosítása érdekében) minden tengelyen, és egy elektronikus DCE jelű vezérlőegység vezérli.[15][16]
Motorok szerkesztés
A Rover motorizálását kerekenként szerelt villanymotorokkal oldották meg. Ezeknek az egységeknek több követelménynek is meg kellett felelniük: változó nyomatékkal kellett rendelkezniük (a nagyobb akadályok leküzdéséhez), változtatható sebességet kellett biztosítsanak (amellyel a tudományos kutatási idő maximalizálását kívánták elérni), magas hatásfokon kellett működniük (a rendelkezésre álló energia miatt az elektromos fogyasztás korlátok közé szorítása mellett) és szintén magas fékezési dinamikát kellett biztosítani. Ezen kívül ezeknek a motoroknak vákuumban kellett működniük, amely korlátozta a hőelvezetésüket.[15][16]
Mind a négy kerék hajtott volt, így mindegyiket egy 0,25 LE (0,2 kW) teljesítményű villanymotor hajtotta meg, amely hajtást egy 1/80 áttételű fogaskerék áttételen keresztül vittek át a kerekekre. Magát a berendezést hermetikusan lezárták és nitrogénnel töltötték meg, amely a túlmelegedés elleni tervezési jellemző volt és így tudták kiküszöbölni a vákuum negatív hőelvezetési hatását. A motorokat szükség esetén manuálisan ki lehetett kapcsolni, a kerekek szabadonfutása mellett.[15][16]
A motorok két, nem újratölthető ezüst-cink akkumulátorral működnek. Ezek tömege egyesével 27 kg, kapacitása 121 Ah, és 36 voltos feszültségen biztosít áramot. Mindegyik akkumulátor 25 plexiüveg cellát tartalmaz magnézium dobozban: a cink – ezüst lemezeket kálium-hidroxid elektrolitba merítik. Az akkumulátorok külön-külön vagy párhuzamosan is működtethetők. A normál működéshez csak egy akkumulátor volt szükséges ez elegendő kapacitással rendelkezett a motorok áramellátásához a három holdséta során. A második akkumulátort a biztonság érdekében építették be. Az akkumulátorok táplálják a különböző elektronikai egységeket, elosztódobozokat is, amelyek körülbelül 50 wattot fogyasztottak, amikor a jármű mozgásban volt.[15][16]
A motorok 14 km/h maximális sebességet biztosítottak a Rovernek. Az Apollo–17 küldetés során azonban feljegyezték, hogy lejtmenetben 17,7 km/h sebességet ért el a jármű a Lee-Lincoln emelkedő lejtőjén. Az egyenletes utazósebesség 10 km/h volt. A Rover fedélzetén akkumulátorokban tárolt energia lehetővé tette volna 90 km megtételét, a gyakorlatban azonban a maximális megtett távolság 35 km volt az Apollo–17 expedíció során. A holdjáró 25%-os lejtőt volt képes legyőzni fel- és lefelé üzemmódban, és kis sebességgel egy 30 cm-es akadályt, vagy 70 cm-es gleccserszakadékot tudott leküzdeni.[15][16]
szerkesztés
A holdjárót az űrhajósok a két ülés között elhelyezett irányítókarral (joystick) tudták irányítani, annak előre döntésével előremenetbe, hátra húzásával fékezésbe vezérelve azt, illetve a megfelelő oldal irányú döntéssel a bal, illetve jobb irányba való kormányzást kiváltva. A joystick előtt pedig a műszerfalat helyezték el, amely a Rover fő paramétereiról, illetve a navigációhoz szükséges helyzetéről adott tájékoztatást. Mind a műszereket, mind az irányítókart elvileg mindkét űrhajós használhatta, a gyakorlatban ez a feladat a bal oldali ülésen helyet foglaló parancsnoké volt, a másik ülésben ülő holdkomppilóta csak vészhelyzetben, vagy más különleges esetben vette volna át ezt a feladatot tőle.[15][16]
Kezelőszervek és műszerfal szerkesztés
.jpg)
A jármű nem rendelkezett hagyományos kormánykerékkel, helyette egy T alakú botkormánnyal lehet irányítani, amelyet a kesztyűs kézzel való használatra optimalizáltak. A Rovert vezető űrhajós a bot előre tolásával mozgatta az LRV-t, a sebesség arányos volt a botkormány dőlésével. A bot balra vagy jobbra döntésével a vezető elfordíthatta a járművet. A fék akkor lépett működésbe, amikor a vezető hátrafelé húzta a botot (ez a mozgás megfordította az villanymotorok forgásirányát, majd amikor a bot semleges helyzetbe került, rögzítette a rögzítőféket – erre minden keréken dobféket alkalmaztak –, ami 35%-os lejtőn tudta megtartani a járművet. A joysticken található gomb tette lehetővé a hátramenet kapcsolását, azaz az irányítókar működésének megfordítását.[15][16]
A joystick elé helyezett műszerfal mutatta a jármű navigációjához és működéséhez, vezérléséhez szükséges fő információkat. A kijelzett adatok a következők voltak:
- a Rover sebessége (a jobb első keréken elhelyezett kilométer számláló által mérve),
- a megtett távolság (100 méteres pontossággal),
- a lejtés és a dőlés szöge,
- a követett irány (5 °-os kalibrálású skálán),
- a holdkomp helyzetét (iránytűnek megfelelő skálázású kijelzéssel és 100 méteres távolsági pontossággal),
- az akkumulátorok feszültségét és fennmaradó töltöttségét,
- az akkumulátorok és az elektromos motorok hőmérsékletét.[15][16]
A kapcsolók formában beépített kezelőszervek lehetővé teszik az áram alá helyezést, a kimerült akkumulátor leválasztását, a navigációs rendszer alaphelyzetbe állítását, a giroszkóp beállítását, az egyes kerekek motorjának be- és kikapcsolását, az első és hátsó kormányzás motorjainak be- és kikapcsolását. A navigációhoz kapcsolódó kezelőszervek a műszerfal felső részében voltak csoportosítva, az akkumulátor töltöttségének és hőmérsékletének vezérlésével kapcsolatos vezérlők pedig az alsó részben.[15][16]
Ennek a kapcsolós logikájú kezelőpanelnek köszönhetően az űrhajósok képesek voltak megbirkózni a Rover esetlegesen felmerülő hibáival, például a váltás az egyik akkumulátorról a másikra, vagy az egyik tengely kormányzásának leállítása, vagy aktiválása stb.[15][16]
szerkesztés
A Holdon való tájékozódás nehezebb, mint a Földön, mert a természetes mágnesesség hiánya nem teszi lehetővé az iránytű igénybevételét. Ezen túlmenően a Hold kisebb mérete sík talajon közelebb hozza a horizontot, körülbelül 3 km-re. A Rover ennek megfelelően egy a Földön alkalmazotthoz képest más elven működő, kifinomult navigációs rendszerrel lett felszerelve. Ez az egység két funkciót látott el: viszonylag pontosan megadta a holdkomp helyzetét a holdjáróhoz képest, feltüntetve annak távolságát és irányát, illetve lehetővé tette az űrhajósok számára a navigációt a követett irány (a hold észak vonatkozásában) és a távolság kijelzésével. Mindezek az adatok a műszerfalon tájékoztatták a vezetőt.[15][16]
A műszerfalon kijelzett információkat egy kis fedélzeti számítógép, az SPU számította ki, amelyet egy giroszkóp (DG) – a referenciairányt biztosításával – és a minden egyes keréken elhelyezett kilométer-számláló – amelyek a megtett távolságot mérték – láttak el input adatokkal. A holdséta kezdetén a járműben ülő űrhajósok egy olyan eljárással kalibrálták a giroszkópot, amelyet a műszer precessziója miatt többször is megismételhettek az útjuk során. Erre a célra az űrhajósok egy árnyékvetőt, ún. gnómont használnak, amely az azimut mérését biztosította a Naphoz képest. (Az eljárás a következő volt: a Rovert háttal a Nap felé pozícionálták (15 ° tűréssel), majd a műszerfalon elhelyezett gnómont függőlegesbe állították, és feljegyezték az árnyék által meghatározott szöget. Az információkat, kiegészítve a két tengely mentén (lejtés és dőlés) mért dőlésszögével továbbították a Földi irányítóközponthoz, amelyből az irányítók holdi efemerisz táblázatok és számítási képletek segítségével levezették a jármű hossz- és kereszttengelye által bezárt síkott a Hold északi irányának vonatkozásában, és cserébe megkapták a giroszkóp szükséges korrekcióját. Az űrhajósok a műszerfalon található vezérlő segítségével a kapott adatok lapján állíthatták be a giroszkóp helyesbítését.)[15][16]
A Rover tervezési fázisában tanulmány készült a személyzetet a navigációs rendszer meghibásodása esetén fenyegető kockázat felmérésére, amely arra a következtetésre jutott, hogy ez a kockázat nem kritikus. Mivel a holdkomptól való eltávolodást 10 km-re korlátozták, a holdkomp pedig a szürke környezetben színes külalakjával és kb. 6 méteres magasságával kiemelkedik a környezetéből, egy részletes domborzati térkép használatával a feltételezések szerint nem volt valószínű, hogy az űrhajósoknak nehézséget okozott volna űrhajójuk megtalálása. A rendszer specifikációi ezen alapulva végül 700 méter pontosságot írt elő egy utolsó, 4. holdséta idejére. A terepen a valós tapasztalatok alapján kapott pontosság végül kb. 100 méter volt a giroszkóp közbenső átállítása nélkül.[15][16]
Kommunikációs rendszerek szerkesztés

A holdjáró egy többcsatornás távközlési rendszerrel rendelkezett. Az egyik csatorna lehetővé tette az utasai számára, hogy egymással kommunikáljanak, egy másik a földi irányítással való kommunikációt tette lehetővé. Ismét egy másik kommunikációs csatorna a telemetriai adatokat továbbította, amely lehetővé tette, hogy a földi irányítás a kapott adatokból szükség esetén diagnózist állítson fel egy esetleges hiba esetén. Végül pedig a holdjárót felszerelték egy tévékamerával, amelynek adását szintén élőben közvetítették egy csatornán keresztül a Földre.[15][16]
A jármű elejére szerelt színes televíziós kamera lehetővé tette, hogy az űrhajósok valós időben továbbítsák a felvett képeket, de csak a Rover álló helyzetében (mivel az adattovábbításhoz használt antennát pontosan a Földre kellett irányozni, amit csak statikus helyzetben lehetett megoldani, menet közben ez nem volt megoldott). A kamera sajátossága volt, hogy a Földről távvezérelték. Az irányítók és a háttérben dolgozó tudósok így azonnali segítséget nyújthattak az űrhajósoknak a Hold talajának feltárásában. A képet egy széles sávú esernyő alakú antenna továbbította, amely az alváz elején található árbocra volt szerelve és amelyet az űrhajósoknak minden megálláskor a Föld felé kellett irányozniuk. Maga a kamera egy vadonatúj modell CCD (töltéskapcsolt eszköz) érzékelővel, amely lehetővé tette a képek rögzítését a holdkörnyezetre jellemző extrém fényviszonyok között. (Az eszköz első alkalmazása az Apollo–12 küldetés során kudarcba fulladt, amikor a kamerát Alan Bean véletlenül a Nap felé irányozta, a CCD érzékelő kiégett és az eszköz az expedíció hátralévő részében használhatatlanná vált.) A kamera súlya nem haladja meg a 4,5 kg-ot, a felbontása pedig eléri a 400 000 pixelt. Takarékos, 13 wattos fogyasztása, kompakt méretei (101 mm magas, 165 mm széles és 418 mm hosszú) és robusztus felépítése lehetővé tették a Roverre történő felszerelését. A kamerán egy változtatható gyújtótávolságú objektívet alkalmaztak (460 mm-1220 mm között változtatható fókusztávolsággal). A televíziós jelet NTSC szabvány szerinti formátumban továbbították (60 hertzen, 525 sort). A lencsét érő fény szűrők sorozatán ment keresztül, amely három külön képre bontotta az alapvető színeknek (piros, zöld és kék) megfelelő képeket, amelyeket aztán külön rögzítettek. A Földön a monokróm képeket újra egyesítették, hogy a kereskedelmi televíziós hálózatok szabványaival kompatibilis színes képeket hozzanak létre.[15][16]
A televíziós közvetítések egyik bravúrja volt, amikor az utolsó holdexpedíció, az Apollo–17 alkalmával a holdkomp felszálló fokozatának holdi felszállását közvetítették távirányítással.[15][16]
Ezen kívül egy kisebb teljesítményű antenna is felszerelésre került, amely a rádiókommunikáció fenntartását szolgálta akár mozgás közben is. Minden távközlést egy elektronikai doboz kezelt, amelyet saját akkumulátorral szereltek fel a jármű elején.[15][16]
Hőszabályozás szerkesztés
.jpg)
A holdi nappal során szélsőséges hőmérsékletek tapasztalhatók, amelyek az idő előrehaladtával folyamatosan változnak (ugyanez igaz a holdi éjszakára is, ám abban az idősávban már nem terveztek aktivitást a küldetés tervezők). A nappal során a talaj hőmérséklete elérheti a + 130 °C feletti hőmérsékletet is, ahogy a rajta parkoló holdjáró is. Azonban a felhasznált anyagok közül soknál (elsősorban az elektronikai alkatrészeknél) a vivőanyagok komponenseinek hőtűrése erre nem volt alkalmas és csak alacsonyabb hőmérséklet tartományban voltak alkalmasak a használatra. Ezért az expedíciók tervezésénél a kisebb hőmérsékletek érdekében az Apollo repüléseket szisztematikusan a holdi nappalok kezdetére ütemezték, így a maximális hőmérséklet, alacsonyabb volt, például az Apollo-17 esetén feljegyzések tanúsága szerint, a harmadik holdséta során 83 °C-ban állt meg a maximális hőmérséklet.[15][16]
Ezen túlmenően probléma volt, hogy a holdi légkör hiánya nem teszi lehetővé a hagyományos hőcserélő rendszerek alkalmazását. Annak érdekében, hogy a holdjáró működőképes maradjon, a legérzékenyebb alkatrészekre passzív és félig passzív termikus eszközöket kellett szerelni: ilyenek voltak különösen az akkumulátorok és az elektronikus berendezések (pl. giroszkóp (DGU), navigációs számítógép (SPU), kormányvezérlő egység (DCE)), illetve korlátozni kellett a műszerfal felmelegedését, és megakadályozni, hogy a legénység túl magas hőmérsékleten érintkezzen a Rover részeivel.[15][16]
A legérzékenyebb alkatrészek az elektronikus alkatrészek és az akkumulátorok voltak, ezért ezeket szigetelésbe csomagolták, amely 15 réteg alumíniumozott mylarból és 14 réteg nylonból állt. A DGU -ból és az SPU -ból származó többlethőt hőhídon keresztül továbbították. Amikor a hőmérséklet meghaladta a 45 °C-ot, a hőt paraffin tömbök (összesen 2 kg) olvasztásával vonták el.[15][16]
Az akkumulátorokon és a DCE-n elhelyezett, de a portól való védelem érdekében elfedett helyen lévő és ezért a holdséták során nem működő radiátorokat az űrhajósoknak a kinntartózkodásaik végén manuálisan kellett aktiválni (ilyenkor a radiátorok kiemelkedtek a helyükről), hogy a tárolt hőt sugárzás formájában leadják. Amint a hő eloszlott, a radiátorok automatikusan visszasüllyedtek a helyükre, hogy megakadályozzák a hőmérséklet túlzott lecsökkenését is.[15][16]
A Rover más részein a termikus védelmet felületkezeléssel, egyes alkatrészeken (fogantyúk, lábtartók, az ülések csőszakaszain, a padló középső és hátsó panelein) eloxálással, más fém alkatrészeken (műszerfal stb.) speciális festékek alkalmazásával érték el.[15][16]
Szállítás és üzembe helyezés a Holdon szerkesztés
A holdjárót arra készítették fel, hogy a holdkomp egyik rakterében elhelyezhető legyen. Ennek érdekében az alváz összehajtható volt és ilyen állapotában 0,85 m³ helyet foglal el, amikor az LM létrájától jobbra elhelyezkedő rakterében helyezték el. A szállítási állapothoz a Rovert függőleges helyzetben tárolták, az orra lefelé nézett, az alváz első és hátsó része pedig felhajtott állapotban volt, míg a kerekeket az alváz síkjával párhuzamosan hajtották be, illetve az ülések és a lábtámaszok is behajtva álltak. A rugók, a torziós rúd és a reteszek rendszerének köszönhetően egyetlen űrhajós ki tudta csomagolni, aki két, csigákon átvetett nylon kötelet használt a művelethez. A telepítés során a széthajtogatási folyamatot kötelekkel és szövetszalagokkal fékezték. Az eljárás a következő volt: egy űrhajós felmászott a létrán az LM ajtajának szintjére, és kinyitotta a rögzítőzárat, majd a második űrhajós a talajon állva egy pányva megrántásával oldotta a rögzítéseket és a Rover gyakorlatilag automatikus kihajtogatta önmagát. A holdjáró ehhez először a függőleges helyzetből vízszintesbe állt, kihajtódott az alváz elülső része és a kerekek, majd miközben a hátsó rész a kerekekkel szintén kinyílt, az első kerekeket a talajra eresztették, majd szép lassan a hátsó kerekeket is a talajra eresztették. Ezután a manuális műveletek keretében az árhajósok felállították az összehajtott üléstámlákat és lábtartókat, majd végül felszerelték rá a külön dobozban tárolt kamerákat, antennákat és elektromos szerelvényeket.
Működése a Holdon szerkesztés

A megépült négy, űrrepülésre szánt példányból végül hármat használtak fel az Apollo–15, Apollo–16 és Apollo–17 expedíciókon. Mindhárom küldetésen egyenként három holdséta alkalmával használták a Rovereket, amelyek így összesen kilenc holdi kutatóúton szállították az űrhajósokat és azok tudományos felszerelését. A holdséták során minden alkalommal a repülés parancsnoka volt a Rover vezetője, míg a holdkomppilóta a navigációt segítő utasként utazott vele. Főszabály volt, hogy a holdjáró nem távolodhat el messzebb a holdkomptól, mint amennyiről az űrhajósok gyalog is visszatérhetnek szükséghelyzetben, így viszonylag limitált távolságokat tettek meg az egyes legénységek. Ezen szabály alól egyedül az Apollo–17 egyik holdsétája volt a kivétel, amelynek során – tekintettel a holdjáró és az űrruhák addig tapasztalt megbízhatóságára – engedélyezték az űrhajósok számára kicsivel nagyobb távolság megtételét is, mint az elméleti határ, bár még ez a túllépés sem volt jelentős.[17]
A holdjáró(k) által megtett utak adatai:[1]
| Repülés | Teljes megtett távolság | Teljes vezetési idő | A leghosszabb út | Maximum távolság a holdkomptól | Végső helyzete a Holdon |
|---|---|---|---|---|---|
| Apollo–15 (LRV-1) | 27,76 km | 3 óra 2 perc | 12,47 km | 5,0 km | 26,08° N – 3,66° E |
| Apollo–16 (LRV-2) | 26,55 km | 3 óra 26 perc | 11,59 km | 4,5 km | 8,97° S – 15,51° W |
| Apollo–17 (LRV-3) | 35,89 km | 4 óra 26 perc | 20,12 km | 7,6 km | 20,17° N – 30,77° W |
Apollo–15 szerkesztés
A legelső J–típusú küldetés, amely holdjárót vitt magával Nixon elnök döntése alapján az Apollo–15 lett (a döntés értelmében törölték két repülés költségvetési támogatását, az utolsó gyalogos, és az utolsó holdjárós küldetését, amely eredetileg az Apollo–15 és az Apollo–19 lett volna, így az egész sorozat egyet előrelépett, így lett az Apollo–15 az utolsó gyalogos (H-típusú) expedícióból az első holdjárós (J-típusú) expedíció. A holdjáróval való gyakorlást és annak berepülését egyébként még az eredeti első holdjárós repülés, az Apollo–16 űrhajósai kezdték meg és a kiképzési programon időközben kellett változtatni úgy, hogy a Dave Scott, Jim Irwin kettős is be tudja gyakorolni a holdjárós tevékenységet.[18]
A repülés 1971. július 26-án startolt Cape Canaveralról és az LRV–1 jelű első holdjáró 1971. július 30-án szállt le a Holdon, a Mare Imbriumon (az Esők Tengerén), az ún. Hadley-Appenninnek leszállóhelyen. A holdfelszíni tevékenység a holdjáró felélesztésével és kipróbálásával kezdődött, olyannyira, hogy ezen a repülésen szakítottak azzal a hagyománnyal, hogy az első teendő a holdséta során az ALSEP felállítása és üzembe helyezése. Ehhez képest ezen az expedíción az első teendő a holdjáró kicsomagolása és útra késszé tétele volt (amely gond nélkül sikerült), majd rögtön egy próbaút következett, amelynek keretében az űrhajósok elhajtottak a kb. 3,5 kilométerre levő Elbow-kráterhez, amely a Hadley-hegy oldalában fenn terült el. Az induláskor derült ki a Rover egyetlen komolyabb hibája, az első kerekek kormányzása valamiért nem működött, csak a hátsó kerekeket lehetett kormányozni (amely hiba a második holdsétára magától megjavult).[19] A próbaút mintegy 45 perces volt és teljes sikerként értékelték (és ekkor volt jelentősége annak, hogy Scottnak nem sikerült a korábbiakhoz hasonló tűpontos leszállást végeznie, 550 méterrel a kijelölt célpont mellett tette le a Falcont, de ez a távolság a Roverrel felszerelkezve semmit sem számított).[18]
A második és harmadik űrsétán hasonlóan sikeres geológiai kutatóutakat tettek (előbbit hosszabb, utóbbit a készletek váratlan fogyása miatt rövidebb időtartamban), meredek hegyoldalra kaptatva, régebbi és újabb kráterekben és megtalálva az egész Apollo-program egyik legrégebbről származó. 4,5 milliárd éves anortozit kőzetmintáját, a Teremtés Kövét. A műveletek végén a parancsnok kb. 100 méterrel a holdkomptól távol parkolta le a holdjárót, hogy azt ne érintse a felszálló holdkomp gázsugara és egy esetleges későbbi küldetés sértetlenül találja majd meg, egyéni akcióként pedig egy kis mini Bibliát hagyott a bal első ülésen.[18][20]
-
 A teljes holdi leszálló hardver jobbra a holdjáróval
A teljes holdi leszálló hardver jobbra a holdjáróval -
 Jim Irwin és az LRV–1
Jim Irwin és az LRV–1 -
 Dave Scott vezeti a Rovert
Dave Scott vezeti a Rovert -
 Irwin éppen a holdjármű „csomagterébe” pakol
Irwin éppen a holdjármű „csomagterébe” pakol -
 Az LRV–1 egy lankás lejtőn parkol
Az LRV–1 egy lankás lejtőn parkol -
 A Rover a holdi „hegyek-völgyek” között
A Rover a holdi „hegyek-völgyek” között



.jpg)
.jpg)
.jpg)
Apollo–16 szerkesztés
A második J-típusú holdexpedícióra az LRV–2 jelű jármű indult 1972. április 16-án, majd szállt le a Holdra az Orion holdkomppal 1972. április 21-én John Young parancsnokkal és Charlie Duke holdkomppilótával. A leszállás a parancsnoki űrhajó hibája miatt késést szenvedett el, azonban ezen kívül az Apollo–16 repülés technikailag tökéletesre sikerült.[21]
Az Apollo–16 űrhajósai három holdsétát tettek és mindhárom alkalmával használták a Rovert is. az első holdsétán visszatértek a hagyományos műveleti sorrendhez és a holdjárót csak az ALSEP felállítását követően vették használatba, így az első holdsétán csak egy kisebb felfedezőutat tettek a járművel. Ahogy a harmadikon is, mivel a leszállás késedelme miatt az egész holdfelszíni időt lerövidítette az irányítás, így a harmadik holdséta is csonka maradt, idejében és távjában lerövidített geológiai kutatóúttal. A legteljesebb kutatási programot a második kiszálláskor végezhették az űrhajósok, amelyben segítségükre volt a holdjárművük is (bár sem a legnagyobb holdkomptól való eltávolodás, sem a leghosszabb vezetés rekordját nem sikerült átvenni az Apollo–15 űrhajósaitól). Ezúttal is a legváltozatosabb geológiai képződményeket sikerült felderíteni a Rover adta sokkal nagyobb szabadság révén.[21]
Az egyetlen említésre méltó mozzanat az volt, amikor a második holdséta során elhagyták az űrhajósok a Rover egyik sárvédőjét és a kerék által felvert por esőként borította be őket és a járművet egyaránt. A probléma számos hibaforrás szülőanyja volt: az űrhajósok ruhája nagyon beszennyeződött és ezt a szennyeződést magukkal vitték a kabinba, de ami fontosabb a por eltömte a ruha cipzárjait és elakadásokat okozott rajta. Másik problémaforrás volt, hogy a felvert por megült egy sor érzékeny Rover alkatrész felületén, ezzel megváltoztatva a színét, nagyobb hőelnyelést okozva, ami az alkatrész túlzott melegedéséhez vezetett.[21]
-
 Az Apollo–16 holdjárójának közelképe
Az Apollo–16 holdjárójának közelképe -
 Charlei Duke készül felszállni a Roverre
Charlei Duke készül felszállni a Roverre -
 A parancsnok John Young és a holdjáró
A parancsnok John Young és a holdjáró -
 Nehéz terep a Rover számára (egyébként a „moonhoax” hívők egyik legtöbbet idézett fotója)
Nehéz terep a Rover számára (egyébként a „moonhoax” hívők egyik legtöbbet idézett fotója) -
 Munka a hegyoldalban (Young a Descartes lejtőjén)
Munka a hegyoldalban (Young a Descartes lejtőjén)
.jpg)
.jpg)
.jpg)


Apollo–17 szerkesztés
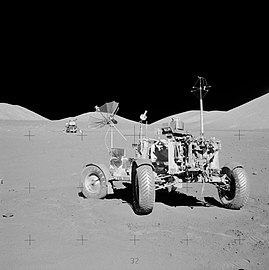
Az Apollo–17 1972. december 7.-i startja volt az utolsó, amely a Holdra indult emberekkel és az LRV–3 volt az utolsó holdjáró, amely leszállt a Holdon a Challenger holdkomppal. Gene Cernan parancsnok és Jack Schmitt holdkomppilóta, az első tudós űrhajós (egy geológus) 1972. december 11-én tette le a holdkompot a holdjáróval a Taurus-Littrow-völgyben levő leszállóhelyen, hogy az első olyan expedíciót teljesítsék, amelyet nem befolyásol semmilyen váratlan esemény, vagy hiba és a legteljesebben volt kihasználható általa a holdi hardver adta lehetőség.[22]
A holdfelszíni tartózkodás során összesen három holdsétát teljesített a két űrhajós és minden tekintetben rekordokat döntögettek. A rekordok a holdjáró használatára is vonatkoztak. Ezen az expedíción távolodtak el leginkább a holdkomptól, itt tették meg a leghosszabb utat a holdjáróval és gyűjtötték össze a legtöbb kőzetmintát, mindamellett, hogy összességében is a legtöbb időt töltötték a holdfelszínen, mind az űrhajóban, mind azon kívül. A Rover ezúttal is hasznos eszköznek bizonyult, bár egy ember okozta hiba ezúttal is felmerült. Rögtön az első holdséta alkalmával a parancsnok véletlenül ráejtett a sárvédőre egy geológiai kalapácsot, amitől az letört. Az Apollo–16 tapasztalataiból kiindulva a náluk levő ragasztószalaggal megpróbálták az űrhajósok megjavítani, de a holdpor ezt megakadályozta, a ragasztószalag nem ragadt megfelelően a rátapadt holdpor miatt. A rögtönzött javítás miatt a sárvédő az út során el is veszett. A további hibák felmerülésétől félve az irányítás egy rögtönzött (térkép kemény fedlapjából és kapcsokból álló) tartalék sárvédőt eszkábáltatott a két űrhajóssal, akik azt rögzítették a járművükre, hogy ne kelljen a felverődő por viharában utazniuk és ne kelljen a meghibásodásoknak elébe nézniük.[22]
Végül a harmadik holdséta befejeztével ezt a Rovert is távolabb parkolták a holdkomptól, hogy az űrhajó felszállása ne tegyen kárt benne és először közvetítették sikeresen a Roverre szerelt és Houstonból távirányított kamerával a holdkomp felszálló fokozatának felszállását.[22]
-
 Az Apollo–17 első próbaútja (még a kamera, az antennák és egyéb eszközök nincsenek is felszerelve rá)
Az Apollo–17 első próbaútja (még a kamera, az antennák és egyéb eszközök nincsenek is felszerelve rá) -
 Gene Cernan parancsnok készülődik felszállni a Roverre
Gene Cernan parancsnok készülődik felszállni a Roverre -
 A Rover a háta mögött elterülő kráter szélén parkol
A Rover a háta mögött elterülő kráter szélén parkol -
 Egy másik lejtős parkolóhely
Egy másik lejtős parkolóhely -
 Jack Schmitt egy ház méretű sziklánál, előtérben a Roverrel
Jack Schmitt egy ház méretű sziklánál, előtérben a Roverrel -
 A híres-hírhedt sárvédő javítás
A híres-hírhedt sárvédő javítás -
 A Rover végső parkolóhelye (távolban a Challenger holdkomp)
A Rover végső parkolóhelye (távolban a Challenger holdkomp)


.jpg)
.jpg)



A holdjárók fellelési helyei szerkesztés

Összesen négy repülőkész holdjárművet gyártottak le az ugyancsak néhány tesztekre és kiképzésre szánt földi példány mellett. A négy éles példányból hármat vitt magával az Apollo–15, –16 és –17 expedíció, míg a negyediket tartalék alkatrészként használták az előző háromhoz az Apollo–18 költségvetési törlését követően. Mivel a holdi hardver egyetlen holdfelszínről visszatérő része a holdkomp felszálló fokozata volt, a holdjárművek a holdkomp leszálló fokozatával együtt az emberek távoztával ottmaradt a felszínen és kvázi űrszemét lett belőlük. 2020-ban ezen státuszuk jogi állásán változtatott a washingtoni törvényhozás, amely a Holdon leszállt és használt leszállóegységeket és Rovereket történelmi emlékműnek nyilvánította. Ezek a következő helyeken találhatóak a Holdon:[23]
- Apollo–15 a Hadley-Apenninneknél (26,13°É 3,63°K )
- Apollo–16 a Descartes-nál (8,97°D 15,50°K )
- Apollo–17 a Taurus-Littrow-nál (20,19°É 30,77°K )[23]
A holdkompoktól távol leparkolt holdjárók kivétel nélkül láthatóak a Lunar Reconnaissance Orbiter szonda 2009-2011 között a Hold körüli keringésből készült fotóin.
Mivel a repülőképes roverek a Holdon maradtak, illetve nem kerültek összeépítésre, a Földön látható kiállítási tárgyként elhelyezett példányok mind teszteken, vagy a kiképzésen használt példányok, vagy másolatok. A mérnöki felmérésre szánt tesztpéldány Seattle-ben a Museum of Flight kiállításán látható, a végső minősítésre szánd példány pedig a National Air and Space Museum Washington, D.C.-beli tárlatán látható. A vibrációs teszteken használt Rover a U.S. Space & Rocket Centerben látható Huntsville-ben. További teszteken használt darabok láthatóak Houstonban a Johnson Space Center-ben és Cape Canaveral-en a Kennedy Űrközpont Látogató Komplexumában. Replikákat helyeztek el Pensacola-ban, a National Museum of Naval Aviation kiállításán, a Evergreen Aviation & Space Museum-ban McMinnwilleben, a Kansas Cosmosphere and Space Center hutchinsoni tárlatán és a Smithsonian Intézet által a Walt Disney World orlandoi Mission: Space attrakciójához kölcsönzött másolatának képében.[24]
Média, érdekességek szerkesztés
Források szerkesztés
Jegyzetek szerkesztés
- ↑ a b c d e f g h i j k l m Lunar Roving Vehicle: Historical Origins, Development and Deployment. NASA. (Hozzáférés: 2021. szeptember 22.)
- ↑ Rendezvous around the Moon. BBC. (Hozzáférés: 2021. szeptember 21.)
- ↑ Dr. Wernher von Braun: ‘Man Will Conquer Space Soon’ Archive. Issuu. (Hozzáférés: 2021. szeptember 21.)
- ↑ Bekker, Mieczysław G.. Theory of Land Locomotion. University of Michigan Press [1956]. ISBN 978-0-472-75020-7
- ↑ W. B. TAYLOR: Summary of Apollo and Lunar Logistics System Plans. NASA. (Hozzáférés: 2021. szeptember 21.)
- ↑ Mary Beth Griggs: Looking Back at NASA’s Strange Mobile Lunar Laboratory. NASA. (Hozzáférés: 2021. szeptember 21.)
- ↑ Mark Wade: LSSM. Astronautix. (Hozzáférés: 2021. szeptember 21.)
- ↑ Grumman Mobility Test Article (MTA). Internet Archive. (Hozzáférés: 2021. szeptember 21.)
- ↑ How We'll Travel on the Moon. Google Books. (Hozzáférés: 2021. szeptember 21.)
- ↑ Anthony Young. Lunar and Planetary Rovers – The Wheels of Apollo and the Quest for Mars. Springer-Verlag New York, 5. o. (2007). ISBN 978-0-387-68547-2
- ↑ a b Jeremy Gray: Lunar rover prototype sold to scrap dealer will be auctioned. Advance Local Media. (Hozzáférés: 2021. szeptember 24.)
- ↑ a b Lunar rover lost: NASA moon buggy found in Alabama backyard sold as scrap. collectSPACE. (Hozzáférés: 2021. szeptember 24.)
- ↑ Dancsó, Béla. Holdséta. Novella Kiadó, 432. o. [2004]. Hozzáférés ideje: 2021. szeptember 28.
- ↑ Mike Wright és Bob Jaques: A Brief History of the Lunar Roving Vehicle. NASA. (Hozzáférés: 2021. szeptember 28.)
- ↑ a b c d e f g h i j k l m n o p q r s t u v w x y z aa ab ac Lunar Roving Vehicle. NASA. (Hozzáférés: 2021. szeptember 29.)
- ↑ a b c d e f g h i j k l m n o p q r s t u v w x y z aa ab ac The Apollo Lunar Roving Vehicle. NASA. (Hozzáférés: 2021. szeptember 29.)
- ↑ Eric M. Jones: Mission Summary – Mountains of the Moon. NASA. (Hozzáférés: 2021. október 5.)
- ↑ a b c Apollo 15 Mission – Surface Operations Overview. Lunar and Planetary Institute. (Hozzáférés: 2021. október 6.)
- ↑ Dancsó Béla: Az Apollo program csúcsa: 35 éve repült az Apollo-15 (2. rész) (magyar nyelven). Űrvilág. (Hozzáférés: 2021. október 5.)
- ↑ Dancsó, Béla. Holdséta. Novella Kiadó, 476. o. [2004]. Hozzáférés ideje: 2021. október 6.
- ↑ a b c Apollo 16 Mission – Surface Operations Overview. Lunar and Planetary Institute. (Hozzáférés: 2021. október 6.)
- ↑ a b c Apollo 17 Mission – Surface Operations Overview. Lunar and Planetary Institute. (Hozzáférés: 2021. október 6.)
- ↑ a b Lunar Roving Vehicles, I, II & III. Wisaard. (Hozzáférés: 2021. október 6.)
- ↑ Jim Gerard: Lunar Roving Vehicles. Americanspacecraft. [2011. augusztus 8-i dátummal az eredetiből archiválva]. (Hozzáférés: 2021. október 6.)
Kapcsolódó szócikkek szerkesztés
További információk szerkesztés
- Apollo17 visszaindulása, holdautó felvétele (MPG, 36sec, 4,8MB)
- Holdautó-szerelési útmutató Archiválva 2011. március 17-i dátummal a Wayback Machine-ben (angol)
- A holdautó az Encyclopedia Astronauticában (angol)
- NASA-NSSDC: Apollo holdautó (angol)
- Negyven éve indult útnak a Holdautó, Múlt-kor, 2011. augusztus 1.